Full System Actuation
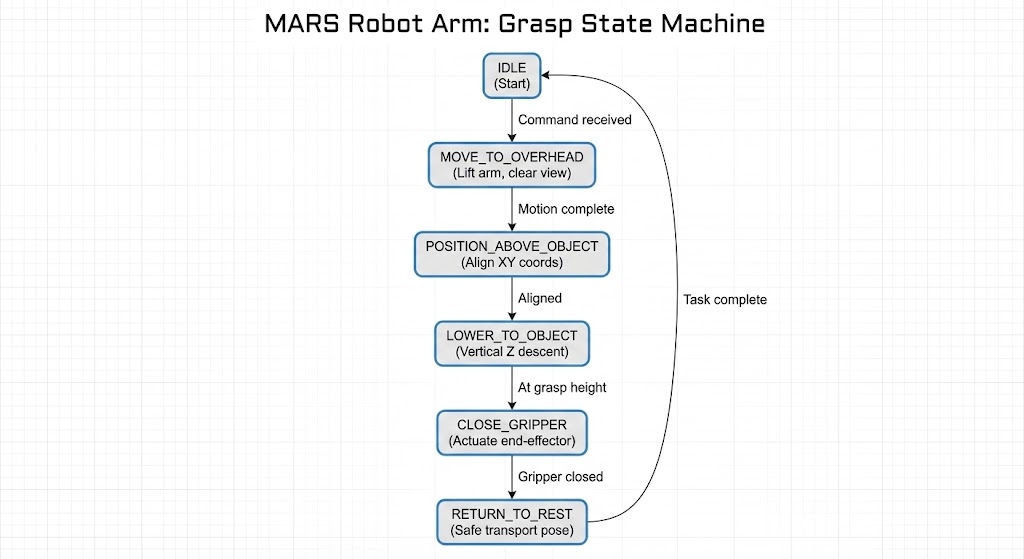
This page details the complete control stack of the MARS robot. From the Closed-Loop Driving Controller that tracks trajectories, to the Manipulation State Machine that orchestrates complex arm movements, and finally the PWM Gripper Control for physical interaction.